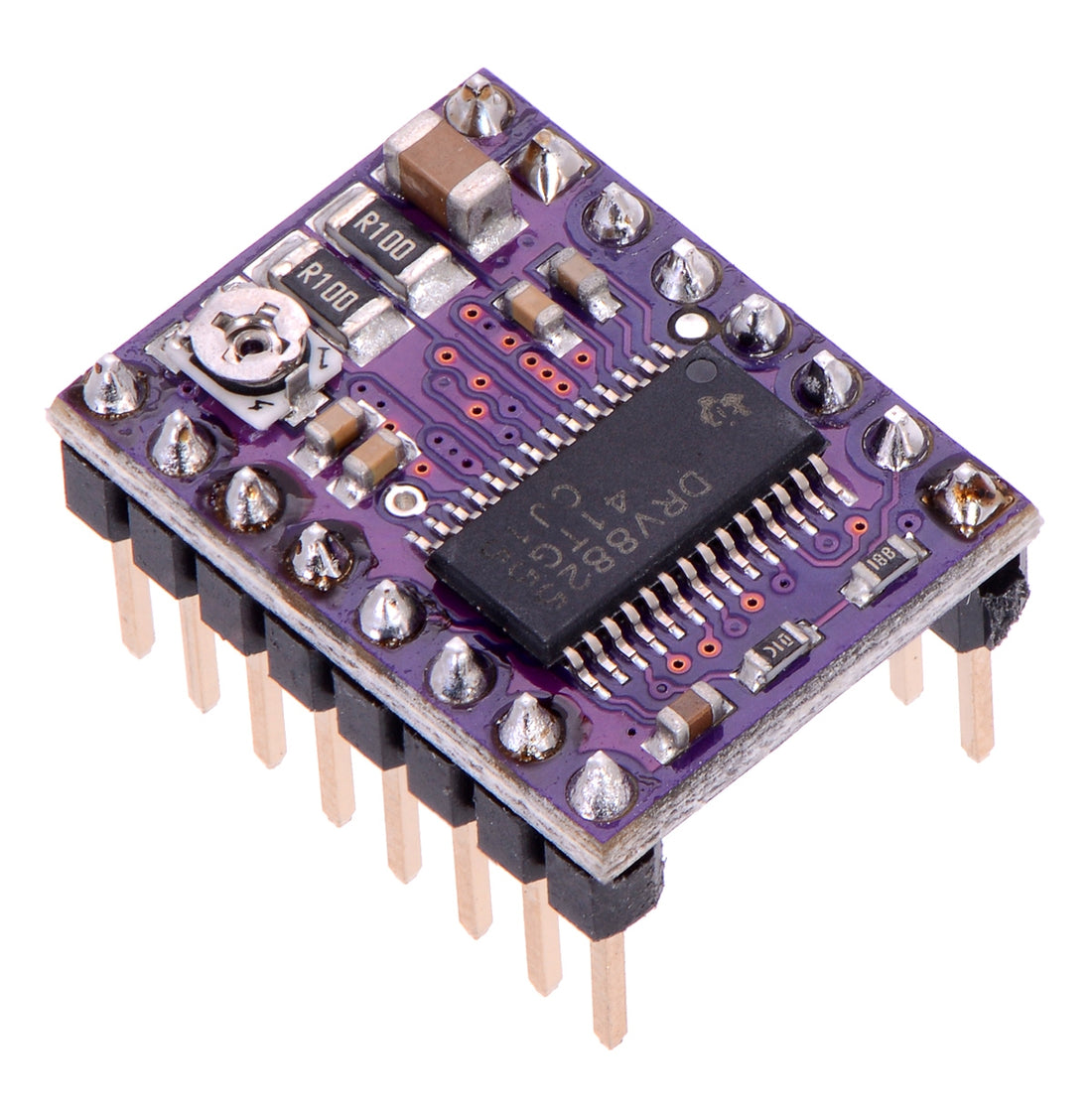
DRV8825 Módulo controlador de motor paso a paso con disipador de calor, p. para RAMPS 1.4, CNC-Shield, impresora 3D, Prusa Mendel
DRV8825 Módulo controlador de motor paso a paso con disipador de calor, p. para RAMPS 1.4, CNC-Shield, impresora 3D, Prusa Mendel
Introducción
DRV8825 son controladores (drivers) que simplifican el manejo de motores paso a paso desde un autómata o procesador como Arduino.
Estos controladores nos permiten manejar los altos voltajes e intensidades que requieren estos motores, limitar la corriente que circula por el motor, y proporcionan las protecciones para evitar que la electrónica pueda resultar dañada.
Para su control únicamente requieren dos salidas digitales, una para indicar el sentido de giro y otra para comunicar que queremos que el motor avance un paso. Además permiten realizar microstepping, una técnica para conseguir precisiones superiores al paso nominal del motor.
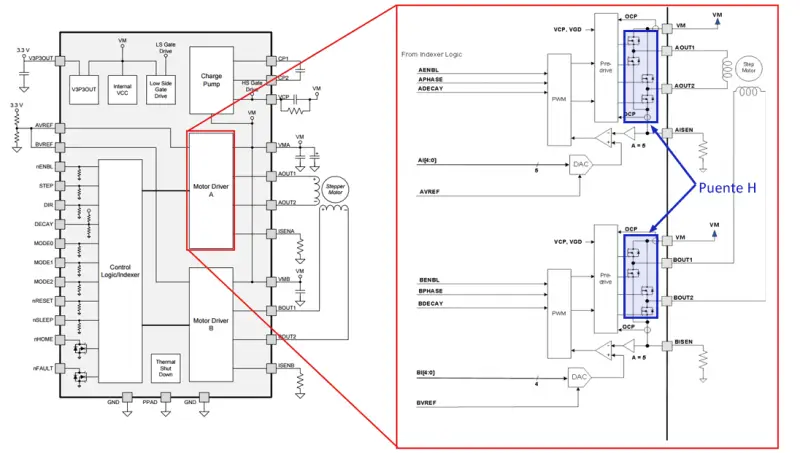
Esquema del DRV8255
cómo vemos, los puentes-H (remarcados en azul) representan una parte muy pequeña del conjunto.
Regulación de intensidad (Chopping)
Ambos controladores disponen de reguladores de intensidad incorporados. El motivo es que los motores paso a paso de cierto tamaño y potencia, como por ejemplo los NEMA 17 o NEMA 23, necesitan tensiones superiores a las que podrían soportar las bobinas por su corriente nominal.
Por ejemplo, supongamos que tenemos un motor NEMA 17 con 1.2A de intensidad nominal y 1.5 Ohm de resistencia por fase. Según la ley de Ohm deberíamos aplicar 1.8V a cada bobina para que circule la intensidad nominal de 1.2A. Sin embargo, con esa tensión el motor ni se movería.
Para el que el motor funcione correctamente necesitamos aplicar una tensión superior. En este ejemplo, la tensión nominal podría ser 12V. Pero si aplicáramos 12V directamente, nuevamente por la ley de Ohm, pasarían 8A por la bobina, lo cual destruiría el motor en poco tiempo.
Por este motivo, los controladores incorporan un limitador de intensidad, que permiten alimentar el motor a tensiones nominales superiores a las que es posible por su resistencia e intensidad máxima admisible.
Por supuesto, la ley de Ohmn debe cumplirse en todo momento por lo que, continuando con nuestro ejemplo, cuando alimentemos el motor a 12V por la bobina pasará inevitablemente 8A.
El limitador interrumpe la señal proporcionando una señal pulsada PWM de forma que el valor promedio de la intensidad que atraviesa la bobina es la intensidad nominal del motor. Terminando nuestro ejemplo, el limitador de tensión aplicaría el pulso durante el 15% del tiempo y mantendrá el motor apagado el 85% restante.
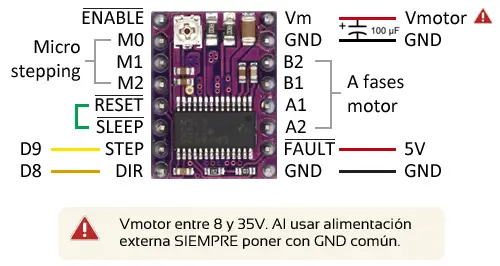
Esquema de montaje

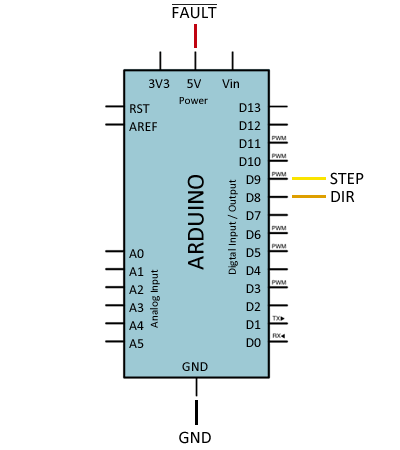
Ejemplo de otro esquema de montaje
El esquema desde Arduino sería idéntico al anterior.
Observar que el potenciómetro está ubicado en extremos diferentes en ambos modelos. Por tanto a la hora de cambiar uno por otro, porque es fácil equivocarse en la orientación, y dañar el dispositivo.
Por otro lado, el potenciómetro del regulador de intensidad no tiene tope físico, por lo que es posible pasar de cero al máximo de valor sin danos cuenta, y podríamos dañar accidentalmente el motor.
Para no dañar ni el controlador ni el componente, debemos seguir siempre el proceso rigurosamente sin saltarnos ningún paso.
- Conectar el driver a tensión, sin el motor y sin microstepping
- Medir con un voltímetro la tensión entre GND y el potenciómetro
- Ajustar el potenciómetro hasta que la tensión sea el valor proporcionado por la fórmula
- Apagar el montaje
- Conectar el motor, interponiendo en medio un amperímetro
- Realizar con cuidado el ajuste fino del potenciómetro, hasta que la intensidad sea la nominal del motor
- Apagar el montaje
- Retirar el amperímetro, y conectar el motor definitivamente
- Conectar Arduino al montaje
Como hemos dicho, el hecho de que vayamos a usar posteriormente microstepping influye en el valor limite que debemos fijar en el regulador de intensidad.